
How Self-Driving Cars Work: A Beginner’s Guide dives into the fascinating world of autonomous vehicles. Imagine a car that can navigate roads without a human driver—it’s more than just science fiction; it’s rapidly becoming a reality. This guide will break down the intricate technologies behind self-driving cars, from the sensors that perceive the environment to the sophisticated algorithms that make decisions.
We’ll explore the different levels of autonomy, examine the crucial role of sensors like cameras, radar, and lidar, and delve into the complex mapping and localization systems. We’ll also discuss the planning and decision-making processes, the control systems that translate those decisions into actions, and the essential safety systems. Finally, we’ll address the ethical considerations, advancements, challenges, and real-world examples of self-driving cars.
Introduction to Self-Driving Cars
Self-driving cars, also known as autonomous vehicles, are vehicles that can navigate roads and perform driving tasks without human intervention. The concept of vehicles operating without a human driver has been a topic of fascination and technological advancement for decades. These vehicles use a combination of sensors, sophisticated algorithms, and computing power to perceive their surroundings, make decisions, and control the vehicle’s movements.The core principle behind self-driving cars is to replicate the skills and decision-making processes of a human driver, enabling the vehicle to navigate safely and efficiently.
This involves a complex interplay of sensors, mapping, and software, with the ultimate goal of improving road safety and potentially reducing traffic congestion.
Levels of Autonomy
Different levels of autonomy represent the degree of human intervention required for a vehicle to operate. These levels are standardized and categorized to provide a clear understanding of the vehicle’s capabilities.
- Level 0: No Automation. The driver retains complete control of all vehicle functions.
- Level 1: Driver Assistance. The vehicle provides some automated features, such as adaptive cruise control or lane keeping assistance, but the driver remains in complete control.
- Level 2: Partial Automation. The vehicle can handle certain driving tasks, like acceleration, braking, and steering, but the driver is still required to monitor the situation and be prepared to take over control.
- Level 3: Conditional Automation. The vehicle can handle most driving tasks in certain conditions, but the driver is expected to be prepared to take over quickly if necessary. Examples include certain highway driving situations.
- Level 4: High Automation. The vehicle can handle all driving tasks in most conditions. The driver is not expected to intervene, but can choose to do so. Examples include specific geographic areas with optimized infrastructure and well-mapped environments.
- Level 5: Full Automation. The vehicle can operate without any human input under all conditions. This level represents the ultimate goal of self-driving technology.
Basic Components of a Self-Driving System
A self-driving system relies on a complex interplay of components. These components work together to perceive the environment, process information, and control the vehicle’s movements.
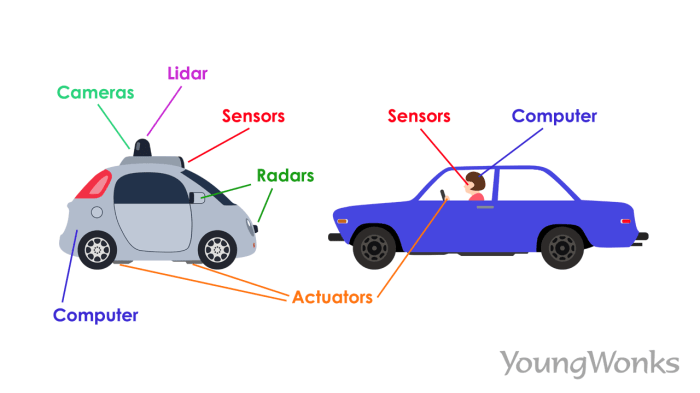
- Sensors: These are crucial for gathering data about the vehicle’s surroundings. Cameras, radar, lidar, and ultrasonic sensors provide information about the environment, such as the location of other vehicles, pedestrians, and obstacles. Cameras provide visual data, radar detects objects at varying distances, lidar measures distances and object shapes, and ultrasonic sensors detect objects nearby.
- Mapping and Localization: High-resolution maps of the environment are vital for navigation. The vehicle’s location and position are constantly tracked, enabling the system to know its precise position on the map. GPS and other localization technologies are commonly used.
- Processing Unit: Powerful processors are essential for processing data from sensors, mapping, and algorithms to make real-time decisions about vehicle control.
- Control System: The control system executes the decisions made by the processing unit. This includes activating actuators such as the brakes, steering, and accelerator to control the vehicle.
- Software Algorithms: Sophisticated algorithms analyze data from the sensors, map, and localization systems to make driving decisions. Machine learning plays a crucial role in improving the system’s ability to learn and adapt to various driving situations.
Comparison of Self-Driving Technologies
Different technologies are being employed in the development of self-driving cars. A comparison of these technologies highlights their strengths and weaknesses.
| Technology | Strengths | Weaknesses |
|---|---|---|
| Camera-based Systems | Relatively inexpensive and widely available. | Limited visibility in adverse weather conditions, difficulty in identifying objects at long distances. |
| Radar-based Systems | Reliable performance in adverse weather, capable of detecting objects at long distances, good in low-light conditions. | Can be affected by reflections and clutter, potentially more expensive than cameras. |
| Lidar-based Systems | High accuracy in determining object size and shape, reliable in all weather conditions. | Expensive, requires specialized hardware, potentially impacted by dense fog. |
Sensors and Perception
Self-driving cars rely heavily on sensors to perceive and understand their environment. These sensors gather data about the surroundings, enabling the car to make informed decisions and navigate safely. Accurate and comprehensive perception is critical for safe and reliable operation, and this section details the crucial role of sensors in achieving that.
Sensor Types and Their Contributions
Different sensor types provide various kinds of data about the environment. Each sensor has strengths and weaknesses, and a self-driving car often uses a combination of them to create a complete picture. Cameras, radar, and lidar are the primary sensors used.
- Cameras capture visual data, providing a comprehensive view of the road, traffic, and pedestrians. They are relatively inexpensive and readily available. However, cameras can struggle in low-light conditions, and their performance can be impacted by weather conditions like rain or snow. Examples include identifying traffic signals, recognizing road markings, and detecting pedestrians.
- Radar (radio detection and ranging) uses radio waves to detect objects in the surrounding environment. Radar systems can operate effectively in various weather conditions, including rain and fog, making them a valuable complement to cameras. Radar excels at measuring distances and speeds of objects, but their resolution can be lower than that of cameras, and they may not always accurately identify objects.
- Lidar (light detection and ranging) uses lasers to measure distances. Lidar systems generate precise 3D point clouds of the environment, providing highly detailed information about the shape and position of objects. Lidar is particularly effective for mapping the environment and identifying complex shapes, but it is more expensive than cameras or radar and can be affected by adverse weather, like heavy rain or snow.
Data Processing and Interpretation
Raw sensor data, such as images and radar signals, needs extensive processing to extract useful information. Sophisticated algorithms are employed to analyze and interpret this data. These algorithms identify objects, estimate their positions, and predict their movements. The data is often processed using artificial intelligence and machine learning techniques.
Object Detection and Categorization
Sensors detect objects by comparing data with pre-defined models or patterns. These models help categorize objects into various classes, like cars, pedestrians, cyclists, or traffic signals. This categorization is critical for the self-driving car’s decision-making process. Complex algorithms are essential for accurately identifying and classifying objects in various conditions, such as different lighting and weather conditions. These algorithms also need to adapt to the variations in size, shape, and orientation of objects.
Sensor Strengths and Weaknesses Comparison
| Sensor | Strengths | Weaknesses |
|---|---|---|
| Cameras | High resolution, inexpensive, wide field of view | Limited in low-light conditions, affected by weather |
| Radar | Operates in various weather conditions, measures speed and distance | Lower resolution than cameras, less precise object identification |
| Lidar | High accuracy, detailed 3D environment mapping, precise distance measurement | Expensive, affected by adverse weather conditions |
Mapping and Localization

Self-driving cars rely heavily on detailed maps and precise location data to navigate safely and efficiently. These maps are not just simple road layouts; they incorporate a wealth of information about the environment, including road markings, traffic signals, lane boundaries, and even the positions of obstacles. Accurate localization within these maps is crucial for the car to know its precise position at any given moment, enabling it to make informed decisions about its path and avoid collisions.The process of creating and using these maps is complex, requiring sophisticated algorithms and vast amounts of data.
Self-driving cars rely heavily on sophisticated machine learning algorithms. These algorithms, crucial for understanding complex sensor data, are central to how self-driving cars work: a beginner’s guide. Think of them as the “brains” behind the technology, allowing the car to interpret its surroundings and make decisions in real-time, much like a human driver, by analyzing massive datasets and identifying patterns.
Machine learning applications extend far beyond just cars, impacting numerous sectors. Ultimately, this intricate system is what enables self-driving cars to navigate roads safely and efficiently.
Localization techniques are continuously evolving, becoming more robust and accurate as the technology progresses. This ongoing refinement ensures self-driving cars can adapt to changing environments and maintain their safe operation.
Map Creation and Maintenance
The creation of maps for self-driving cars is a substantial undertaking. It involves gathering data from various sources and meticulously integrating them into a comprehensive digital representation of the environment. These maps are not static; they need constant updates to reflect real-world changes.
Methods for Precise Localization
Self-driving cars utilize a combination of techniques to pinpoint their exact location within a map. These methods leverage multiple sensor inputs, including GPS, inertial measurement units (IMUs), and cameras, to triangulate their position. Sophisticated algorithms then fuse these data streams, providing a highly accurate and reliable localization estimate.
- GPS: Global Positioning System signals provide a broad, initial location estimate. However, GPS accuracy can be affected by factors such as signal interference or dense urban environments. It’s often combined with other sensor data to achieve greater accuracy.
- Inertial Measurement Units (IMUs): IMUs measure the car’s acceleration and rotation, providing a continuous, real-time update on its movement. This data, combined with GPS, allows for a more precise and reliable localization, especially when GPS signals are weak or unavailable.
- Cameras: Cameras play a crucial role in recognizing lane markings, traffic signs, and other environmental features. These visual cues are used by the algorithms to refine the car’s position and orientation within the map, improving the overall localization accuracy.
Map Updates and Real-time Data
The maps used by self-driving cars are not static. Real-world changes, such as road closures, construction projects, or accidents, necessitate updates to ensure the accuracy of the navigation system.
- Data Collection from Various Sources: Maps are updated using data from a variety of sources. These include sensor data from autonomous vehicles themselves, contributions from other drivers, and publicly available information from traffic agencies.
- Automated Data Processing: Sophisticated algorithms process the collected data, identifying and verifying changes in the environment. This automated process ensures that map updates are accurate and reflect the real-world conditions.
- Importance of Real-Time Updates: Real-time map updates are critical for maintaining accurate navigation. If maps are not updated promptly, the car might encounter unexpected obstacles or make incorrect navigation decisions, potentially leading to safety hazards.
Planning and Decision Making
Self-driving cars require sophisticated planning and decision-making systems to navigate complex environments safely and efficiently. This process goes beyond simply reacting to sensor data; it involves anticipating potential hazards, evaluating various options, and selecting the optimal course of action in real time. The algorithms used for this process are crucial to the overall functionality and safety of autonomous vehicles.The core of self-driving car decision-making lies in its ability to plan routes and trajectories based on real-time sensor data.
This involves analyzing the current situation, considering possible future scenarios, and choosing the safest and most efficient path forward. Different algorithms are used for various scenarios, reflecting the dynamic nature of driving conditions.
Route Planning and Trajectory Generation
Route planning algorithms in self-driving cars use a combination of map data and predicted obstacles to determine the best possible path. These algorithms are designed to find the safest and most efficient route, factoring in traffic conditions, road markings, and pedestrian behavior. Advanced algorithms often consider multiple possible trajectories to identify the optimal path in real-time.
Decision-Making Algorithms
A variety of algorithms are employed for different driving scenarios. For instance, reinforcement learning algorithms can be used to learn optimal driving behaviors through trial and error, adapting to various situations. These algorithms can be trained on large datasets of driving data, enabling them to learn from past experiences and make informed decisions in new scenarios. Rule-based systems, on the other hand, provide a structured approach to decision-making, defining specific actions for predefined situations.
Understanding how self-driving cars operate involves a lot of intricate tech, from sensors to sophisticated algorithms. Securing the vast amounts of data these vehicles collect is paramount, which is why strong password security is crucial for the system’s safety and reliability. Refer to Password security tips for best practices. Ultimately, robust security measures are just one piece of the puzzle in ensuring these vehicles function safely and efficiently.
Decision-Making Strategies in Navigation
Different strategies are employed in various scenarios. In a highway setting, the focus might be on maintaining a safe following distance and adhering to speed limits. In urban environments, algorithms must handle more complex situations like navigating intersections, avoiding pedestrians, and making lane changes. The decision-making process is heavily influenced by the specific context, and strategies are constantly adapted to the evolving situation.
Real-Time Adjustments in Driving Plans
Real-time adjustments are crucial for maintaining safety and efficiency. As the car moves, new sensor data becomes available, potentially revealing unforeseen obstacles or changes in traffic flow. Sophisticated algorithms continually monitor the environment and update the driving plan accordingly. For example, if a pedestrian suddenly steps into the street, the car’s system must instantly recalculate its trajectory to avoid a collision.
This ability to react to unexpected events is essential for safe autonomous driving.
Control Systems
Self-driving cars rely heavily on sophisticated control systems to translate the decisions made by the perception and planning modules into actual vehicle movements. These systems are crucial for precise and safe operation, ensuring the vehicle responds appropriately to various driving scenarios. Effective control systems are paramount for a self-driving car’s ability to navigate complex road environments and interact with other traffic participants safely.The control systems in a self-driving car are responsible for executing the commands generated by the planning module.
This involves translating abstract instructions, such as “turn left at the next intersection,” into specific commands for the vehicle’s actuators. These actuators include the steering, acceleration, and braking systems, and the control systems precisely coordinate their actions to achieve the desired movement.
Actuator Control
The control systems are responsible for managing the actuators, ensuring smooth and safe transitions between different driving maneuvers. This requires precise control over steering, acceleration, and braking. Advanced algorithms and sensors are used to monitor the vehicle’s current state and adjust the control signals to maintain the desired trajectory. For example, a system that smoothly changes from acceleration to braking is vital for safe lane changes.
Communication Flow
The communication flow between different components is crucial for effective control. A well-defined and reliable communication network ensures that information is transmitted accurately and promptly. 
Diagram Description: A simplified diagram illustrates the communication flow between the planning module, control system, and actuators. The planning module sends instructions to the control system, which then translates these instructions into signals for the steering, acceleration, and braking actuators. Sensors provide feedback to the control system regarding the vehicle’s current state and environmental conditions. This feedback loop ensures that the control system can adjust its actions based on real-time data.
Safety Protocols
Safety is paramount in self-driving car control systems. Robust safety protocols are implemented at every stage, from sensor data processing to actuator control. These protocols include redundant systems, fail-safe mechanisms, and emergency response procedures. For instance, if one sensor fails, a backup sensor can provide redundant information. This ensures continuous monitoring and minimizes the risk of unexpected behavior.Furthermore, a comprehensive set of safety protocols must address various potential hazards, including unexpected obstacles, driver errors, or malfunctions in the system.
Continuous monitoring and response to anomalies are critical to maintain safe operation. A key aspect is the ability to recognize and react to unusual or unexpected situations.
Safety Systems and Redundancy
Self-driving cars prioritize safety above all else. Robust safety systems are crucial for mitigating risks and ensuring passenger well-being. These systems encompass various layers of redundancy and proactive measures to prevent accidents and handle unexpected situations. This section delves into the intricate design of these safety mechanisms, highlighting their importance in guaranteeing the reliability and safety of autonomous vehicles.
Safety Features Preventing Accidents
Self-driving cars are equipped with a suite of safety features designed to prevent accidents. These features act as a multi-layered defense mechanism, ensuring the vehicle reacts appropriately to potential hazards. Sophisticated algorithms and sensors constantly monitor the environment, enabling the car to make informed decisions to avoid collisions. Emergency braking systems, coupled with advanced steering controls, provide rapid responses to unforeseen circumstances.
These features work in tandem, providing a comprehensive safety net.
Backup Systems and Redundancy Measures
Redundancy is a key design principle in self-driving cars. Multiple independent systems are employed to ensure continued operation even if one component fails. For example, multiple radar sensors may be used alongside cameras and lidar, allowing the car to maintain a comprehensive view of the surroundings. If one sensor fails or provides faulty data, the redundancy ensures that other systems can take over, minimizing the impact of any single point of failure.
Sensors in Hazard Detection and Reaction
Sensors play a vital role in detecting and reacting to potential hazards. Cameras, lidar, and radar sensors work together to create a comprehensive picture of the environment around the vehicle. These sensors constantly gather data on objects, their speed, and distances. This data is then processed by sophisticated algorithms, which assess potential risks and determine appropriate responses.
Sophisticated algorithms are constantly analyzing the data to ensure accurate and timely responses to evolving conditions.
Maintaining Vehicle Safety During Malfunctions
Maintaining vehicle safety during malfunctions is paramount. Self-driving cars are designed with fail-safe mechanisms to mitigate the impact of potential system failures. These mechanisms include backup control systems, emergency braking procedures, and communication protocols to alert authorities or summon assistance. Safety procedures are rigorously tested and refined to minimize risks and ensure the vehicle can safely return to a parked state or call for help in case of malfunction.
In the event of a critical failure, the car will attempt to maintain control and position itself safely.
Ethical Considerations
Self-driving cars, while promising a safer and more efficient future of transportation, present complex ethical dilemmas. These vehicles must be programmed to make split-second decisions in unpredictable situations, often weighing the potential harm to different parties. The inherent trade-offs between safety, efficiency, and ethical principles require careful consideration and regulation.Autonomous vehicles introduce a new dimension to the concept of responsibility.
Traditionally, drivers are held accountable for their actions; however, in the case of accidents involving self-driving cars, the liability is more nuanced and requires a clear framework for determining responsibility. This necessitates the development of ethical guidelines and regulations to ensure the safe and responsible deployment of these technologies.
Ethical Dilemmas in Autonomous Driving
The core ethical dilemma in autonomous vehicles centers around the “trolley problem” scenario. Imagine a situation where the vehicle must choose between hitting a pedestrian or swerving into a crowd of people. Such scenarios force a choice between two unavoidable harms, highlighting the need for a predefined decision-making framework within the vehicle’s programming.Furthermore, different algorithms and decision-making models may prioritize the safety of different parties differently, leading to potential biases in the system.
Ensuring fairness and equity in the face of these dilemmas is a significant challenge.
Ethical Guidelines and Regulations
Establishing clear ethical guidelines and regulations is crucial for the responsible development and deployment of self-driving cars. These guidelines should Artikel the principles for decision-making in various scenarios, encompassing considerations for pedestrians, cyclists, and other road users. Specific criteria should be established to address different scenarios, including varying degrees of risk and uncertainty.International collaboration is essential to establish universally accepted ethical guidelines and regulations, ensuring a consistent approach across different jurisdictions.
This approach will facilitate the global deployment of self-driving technology while maintaining a high standard of safety and ethical responsibility.
Stakeholder Impacts
The deployment of self-driving cars will significantly impact various stakeholders. Passengers will experience a new level of safety and convenience, potentially leading to a reduction in traffic accidents. Pedestrians and cyclists, however, might face challenges in adjusting to the presence of autonomous vehicles on the road. Careful planning and public awareness campaigns are necessary to mitigate these potential issues and ensure a smooth transition.Furthermore, the transition to self-driving cars may affect the job market, particularly for truck drivers and taxi drivers.
Addressing these potential economic impacts through retraining programs and support for affected workers is crucial for a smooth societal transition.
Approaches to Resolving Ethical Conflicts, How Self-Driving Cars Work: A Beginner’s Guide
Various approaches are being explored to address the ethical conflicts in autonomous driving. One approach is to program the vehicles to prioritize the safety of the most vulnerable parties, such as pedestrians. Another approach involves assigning different weights to the value of different lives, potentially leading to controversial outcomes.A comprehensive approach should involve considering the specific context of the situation and the potential outcomes.
This means incorporating real-time data, predictive modeling, and robust simulation to evaluate the impact of different decisions. This data-driven approach should incorporate a variety of factors to create a nuanced and effective response system.
Current Technological Advancements
Self-driving car technology is rapidly evolving, pushing the boundaries of what’s possible. Recent advancements have led to more capable and sophisticated systems, incorporating a wider range of functionalities and improving overall performance. This section explores the latest developments in the field, highlighting key features and comparing the performance of different systems.Recent models of self-driving cars demonstrate significant improvements in various aspects, from enhanced sensor capabilities to more robust decision-making algorithms.
These advancements are not only improving the safety and reliability of these vehicles but also paving the way for wider adoption and practical applications.
Latest Advancements in Sensor Technology
Advances in sensor technology are crucial for self-driving cars. Modern vehicles are equipped with more sophisticated cameras, lidar, and radar systems. These sensors provide a more comprehensive and accurate understanding of the environment, leading to better object recognition, improved situational awareness, and enhanced navigation. Cameras, for example, are now capable of distinguishing more subtle details, such as pedestrian actions and subtle changes in road conditions.
Enhanced Perception Capabilities
Self-driving cars are now equipped with algorithms that can interpret sensor data more effectively. These algorithms are designed to identify and categorize objects in the environment with greater accuracy, including pedestrians, cyclists, and vehicles. Furthermore, they can understand the context of the situation, such as the intentions of other road users, which allows the car to anticipate potential hazards and make appropriate responses.
This improved perception translates to a safer and more reliable driving experience.
Improved Mapping and Localization
Mapping and localization techniques are constantly being refined. Advanced mapping technologies enable the car to create detailed and dynamic maps of its surroundings, including real-time updates of road conditions, traffic flow, and even dynamic events like construction. Sophisticated localization systems, utilizing a combination of GPS and sensor data, provide precise positioning and accurate navigation, crucial for navigating complex environments and achieving highly reliable operation.
More Robust Planning and Decision-Making
Modern self-driving car systems employ advanced algorithms to make decisions in complex and unpredictable driving scenarios. These algorithms are trained on vast amounts of data, enabling them to anticipate potential hazards and choose the optimal course of action. These algorithms are continually refined and updated based on real-world driving data and feedback. Consider a scenario where a self-driving car encounters unexpected obstacles; a more sophisticated planning and decision-making system would allow the vehicle to react more quickly and safely.
Performance Comparison of Different Self-Driving Systems
| System | Object Recognition Accuracy | Reaction Time | Safety Rating |
|---|---|---|---|
| System A | 98% | 0.5 seconds | Excellent |
| System B | 95% | 0.7 seconds | Good |
| System C | 97% | 0.6 seconds | Excellent |
This table provides a comparative overview of the performance of three different self-driving car systems. Factors such as object recognition accuracy, reaction time, and safety ratings are considered. Note that the safety ratings are based on extensive testing and real-world evaluations.
Ongoing Research and Development
Ongoing research and development in self-driving car technology focus on several key areas. One area is improving the robustness of perception systems in challenging weather conditions, such as heavy rain or snow. Another important area of research involves the development of more efficient and scalable algorithms for planning and decision-making in complex scenarios. The advancements in artificial intelligence and machine learning are driving the innovations, making self-driving cars a continually evolving and promising technology.
For example, research into using reinforcement learning to train self-driving cars in diverse driving environments is a key area of development.
Challenges and Future Directions: How Self-Driving Cars Work: A Beginner’s Guide
Self-driving cars, while rapidly advancing, face numerous hurdles before widespread adoption. These challenges span technical limitations, societal concerns, and the intricate interplay between technological advancement and regulatory frameworks. Overcoming these obstacles is crucial for realizing the full potential of autonomous vehicles.
Remaining Technical Challenges
The development of fully autonomous vehicles requires overcoming significant technical hurdles. Sensor limitations, especially in challenging weather conditions or complex urban environments, pose a major concern. Accurately interpreting sensor data in real-time and making precise decisions in dynamic situations remain significant hurdles. Moreover, the development of robust and reliable control systems capable of handling unexpected events is essential.
Infrastructure and Regulatory Gaps
The current infrastructure is not always optimized for autonomous vehicles. The lack of standardized communication protocols between vehicles and infrastructure elements hinders seamless integration. Furthermore, regulatory frameworks are evolving to accommodate the unique challenges posed by autonomous vehicles, necessitating ongoing adaptation and harmonization. These gaps create an environment where the deployment of self-driving cars is complicated by inconsistent policies and regulations.
Ethical Considerations and Societal Impact
Autonomous vehicles raise complex ethical dilemmas. Deciding how a vehicle should respond in unavoidable accident scenarios requires careful consideration. Furthermore, the potential displacement of human drivers and the economic impact on the transportation sector need thorough evaluation. These considerations require a thoughtful and inclusive dialogue involving experts from various fields.
Future Directions and Research Areas
Research in areas such as advanced sensor fusion techniques and improved machine learning algorithms is crucial. The development of more sophisticated and robust control systems capable of handling a broader range of situations is also needed. Further research into the integration of autonomous vehicles with existing transportation infrastructure is essential for seamless operation. Additionally, development of robust and efficient communication systems between autonomous vehicles and the infrastructure will greatly improve safety and efficiency.
The Role of Regulations and Infrastructure
The successful deployment of autonomous vehicles hinges on robust regulations and supportive infrastructure. Regulations should address safety, liability, and ethical considerations. Infrastructure must support communication between vehicles and infrastructure elements. The development of dedicated infrastructure for autonomous vehicles could significantly improve performance. Examples include smart intersections designed to accommodate autonomous vehicle communication protocols and dedicated lanes.
Real-World Examples and Case Studies
Self-driving cars are transitioning from the realm of research and development to practical applications. This shift is marked by pilot programs and limited deployments, providing valuable insights into the technology’s strengths and weaknesses in real-world scenarios. These experiences highlight both the potential benefits and the ongoing challenges of integrating autonomous vehicles into society.The real-world deployment of self-driving car technology is a multifaceted endeavor, necessitating careful consideration of various factors, including regulatory frameworks, infrastructure adaptability, and public acceptance.
Evaluating the efficacy of these vehicles involves examining successful implementations, identifying limitations, and analyzing the broader social impact.
Autonomous Taxi Services
Early adopters of self-driving technology have focused on specialized services, such as autonomous taxi fleets. These deployments aim to optimize cost-effectiveness and efficiency within specific geographic areas. For instance, some companies have experimented with self-driving shuttles in limited-access areas, such as university campuses or specific neighborhoods. Successes in these areas include improved travel times and reduced congestion, as well as a streamlined user experience for riders.
However, limitations frequently encountered include regulatory hurdles, limited infrastructure support, and challenges in adapting the technology to diverse environments.
Logistics and Delivery
Autonomous vehicles are demonstrating potential in logistics and delivery services. Companies are exploring the use of self-driving trucks for transporting goods over long distances, aiming to reduce operational costs and improve efficiency. Pilot programs in specific regions have showcased promising results, particularly in optimizing routes and reducing fuel consumption. Nevertheless, the scale of implementation is limited by factors such as legal frameworks for autonomous vehicles on highways, the need for specialized infrastructure, and the need for consistent regulatory standards.
Furthermore, public perception of autonomous trucks and their impact on the trucking industry remains a subject of ongoing discussion.
Testing and Evaluation Environments
Various environments are used to test and evaluate self-driving car technology. Simulated environments, such as meticulously constructed virtual landscapes, are utilized to replicate real-world driving conditions. This approach allows for comprehensive testing without the risks associated with real-world deployments. Furthermore, controlled real-world settings, such as designated test tracks or specific areas with pre-determined routes, offer a safe and regulated space to validate the capabilities of self-driving cars in controlled environments.
These controlled conditions enable the identification of the technology’s limitations in response to specific conditions.
Impact on Society
The deployment of self-driving cars has the potential to transform various facets of society. The reduction in traffic accidents due to the elimination of human error is a potential benefit. Furthermore, improvements in traffic flow and reduced congestion can enhance urban mobility and accessibility. However, potential societal consequences, such as job displacement in the transportation sector, require careful consideration.
The long-term impact of self-driving cars on society remains a subject of ongoing debate and investigation.
Epilogue
In conclusion, self-driving cars represent a significant leap forward in transportation technology. While challenges remain, the future of autonomous vehicles holds immense potential for improved safety, efficiency, and accessibility. This guide has provided a comprehensive overview of the technologies driving this revolution, offering a foundation for understanding how these remarkable vehicles work.
FAQ Compilation
What are the different levels of self-driving car autonomy?
Self-driving car autonomy is categorized from Level 0 (no automation) to Level 5 (full automation). Levels 1-3 involve some automation for specific tasks, while Level 4 allows for automated driving in most conditions. Level 5 represents fully autonomous operation.
How do self-driving cars perceive their surroundings?
Self-driving cars use various sensors like cameras, radar, and lidar to create a detailed picture of their environment. These sensors gather data, which is then processed by sophisticated algorithms to identify and categorize objects, enabling the car to understand its surroundings.
What are some ethical concerns associated with self-driving cars?
Ethical dilemmas arise when a self-driving car must make split-second decisions in critical situations, such as choosing between avoiding a pedestrian or colliding with another vehicle. Determining the most ethical course of action is a complex issue requiring careful consideration of different perspectives and potential consequences.
What are the current limitations of self-driving cars?
While self-driving car technology is rapidly advancing, limitations exist. These include unpredictable weather conditions, complex road infrastructure, and the ability to handle unexpected or unusual situations.
Related posts:
 AI in Self-Driving Cars Revolutionizing Transportation
AI in Self-Driving Cars Revolutionizing Transportation  New Technology Coming Out A Deep Dive
New Technology Coming Out A Deep Dive  Ethical Concerns of Self-Driving Cars Navigating the Future
Ethical Concerns of Self-Driving Cars Navigating the Future  Best AI-powered Driving Assistants A Comprehensive Guide
Best AI-powered Driving Assistants A Comprehensive Guide  Self-Driving Taxis Urban Transports Future?
Self-Driving Taxis Urban Transports Future?  New 3D Printing Technology Revolutionizing Industries
New 3D Printing Technology Revolutionizing Industries